mirror of
https://github.com/LearnOpenGL-CN/LearnOpenGL-CN.git
synced 2025-08-23 20:55:27 +08:00
Update all the equations in chapter 1
This commit is contained in:
@@ -64,9 +64,11 @@ glm::vec3 cameraUp = glm::cross(cameraDirection, cameraRight);
|
||||
|
||||
使用矩阵的好处之一是如果你定义了一个坐标空间,里面有3个相互垂直的轴,你可以用这三个轴外加一个平移向量来创建一个矩阵,你可以用这个矩阵乘以任何向量来变换到那个坐标空间。这正是LookAt矩阵所做的,现在我们有了3个相互垂直的轴和一个定义摄像机空间的位置坐标,我们可以创建我们自己的LookAt矩阵了:
|
||||
|
||||

|
||||
$$
|
||||
LookAt = \begin{bmatrix} \color{red}{R_x} & \color{red}{R_y} & \color{red}{R_z} & 0 \\ \color{green}{U_x} & \color{green}{U_y} & \color{green}{U_z} & 0 \\ \color{blue}{D_x} & \color{blue}{D_y} & \color{blue}{D_z} & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} * \begin{bmatrix} 1 & 0 & 0 & -\color{purple}{P_x} \\ 0 & 1 & 0 & -\color{purple}{P_y} \\ 0 & 0 & 1 & -\color{purple}{P_z} \\ 0 & 0 & 0 & 1 \end{bmatrix}
|
||||
$$
|
||||
|
||||
是右向量,是上向量,是方向向量是摄像机位置向量。注意,位置向量是相反的,因为我们最终希望把世界平移到与我们自身移动的相反方向。使用这个LookAt矩阵坐标观察矩阵可以很高效地把所有世界坐标变换为观察坐标LookAt矩阵就像它的名字表达的那样:它会创建一个观察矩阵looks at(看着)一个给定目标。
|
||||
\(\color{red}R\)是右向量,\(\color{green}U\)是上向量,\(\color{blue}D\)是方向向量\(\color{purple}P\)是摄像机位置向量。注意,位置向量是相反的,因为我们最终希望把世界平移到与我们自身移动的相反方向。使用这个LookAt矩阵坐标观察矩阵可以很高效地把所有世界坐标变换为观察坐标LookAt矩阵就像它的名字表达的那样:它会创建一个观察矩阵looks at(看着)一个给定目标。
|
||||
|
||||
幸运的是,GLM已经提供了这些支持。我们要做的只是定义一个摄像机位置,一个目标位置和一个表示上向量的世界空间中的向量(我们使用上向量计算右向量)。接着GLM就会创建一个LookAt矩阵,我们可以把它当作我们的观察矩阵:
|
||||
|
||||
@@ -256,7 +258,7 @@ void Do_Movement()
|
||||
|
||||
|
||||
|
||||
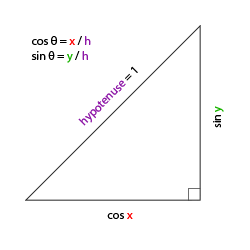
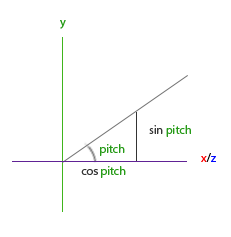
如果我们把斜边边长定义为1,我们就能知道邻边的长度是,它的对边是。这样我们获得了能够得到x和y方向的长度的公式,它们取决于所给的角度。我们使用它来计算方向向量的元素:
|
||||
如果我们把斜边边长定义为1,我们就能知道邻边的长度是\(\cos \ \color{red}x/\color{purple}h = \cos \ \color{red}x/\color{purple}1 = \cos\ \color{red}x\),它的对边是\(\sin \ \color{green}y/\color{purple}h = \sin \ \color{green}y/\color{purple}1 = \sin\ \color{green}y\)。这样我们获得了能够得到x和y方向的长度的公式,它们取决于所给的角度。我们使用它来计算方向向量的元素:
|
||||
|
||||
|
||||
|
||||
|
||||
Reference in New Issue
Block a user